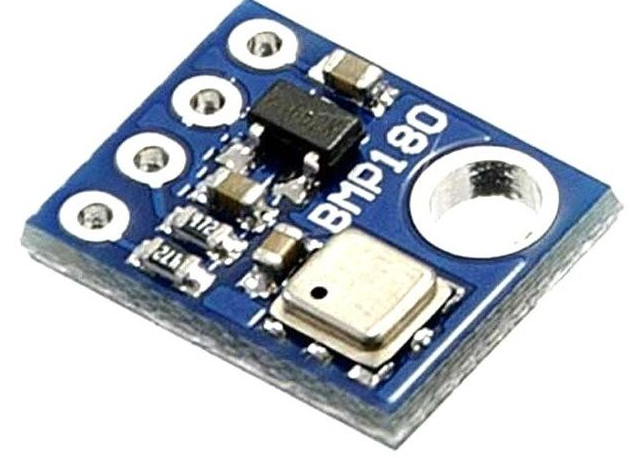
The BMP180
High precision barometric pressure sensor
Has a measuring range between 0 and 1100 hPa.The theoretical error margin is only 0.03 hPa.
The sensor has a power range between 1.8V and 3.6V.
weight 0,77 gram
Here there is a brief explanation of the sensors we have used in our missions. The next list is divided by the port used to send data to the CPU.
The BMP180
High precision barometric pressure sensor
Has a measuring range between 0 and 1100 hPa.The theoretical error margin is only 0.03 hPa.
The sensor has a power range between 1.8V and 3.6V.
weight 0,77 gram

MLX90614
Is an infrared thermometer designed for non-contact temperature sensing. An internal 17-bit ADC and a powerful DSP contribute to the MLX90614’s high accuracy and resolution.
We use it to read the temperature inside the envelope of solar balloons.
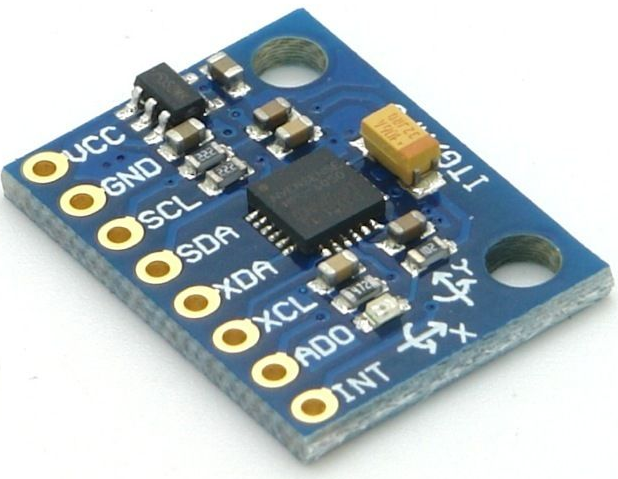
MPU6050
This sensor contains a 3 axis accelerometer and a 3 axis gyro in a single chip. It is very accurate, as it contains 16-bits analog to digital conversion hardware for each channel. Therefor it captures the x, y, and z channel at the same time but z is not accurate and requires a magnetometer.

UBLOX NEO-6 GPS
The NEO-6 devices are a family of receivers manufactured by U-Blox. The NEO-6 has an UART communication interface and supports the NMEA, UBX binary and RTCM protocols
standard baud rate: 9600 bps
But GPS has a default configuration for pedestrians. To be airborne we need to configure it (see UKHAS page) to read up to 50 km high.
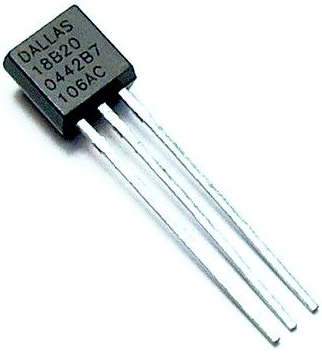
DS18B20
Dallas temperature sensor
Digital temperature sensor with a temperature range of
-55 ºC ~ 125ºC to read the outside air temperature.
Has a great range for the Near Space flights.
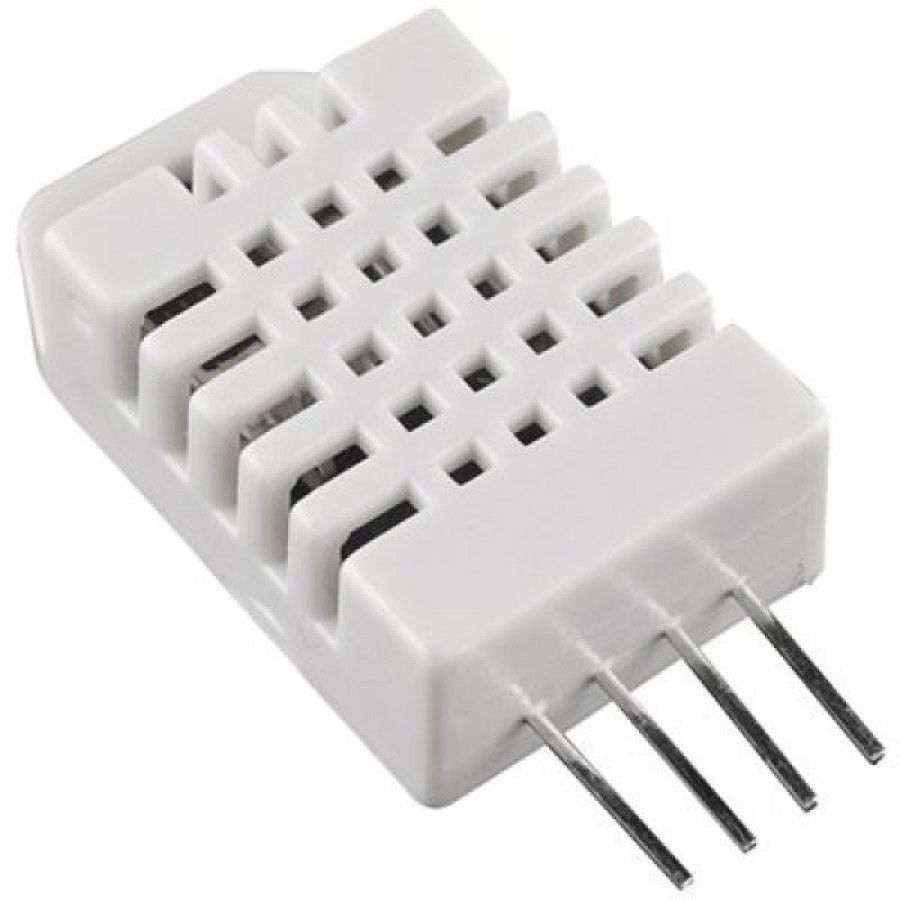
DHT22
Is an humidity and temperature sensor
reads Humidity: 0-100% RH
accuracy: +-2%
and temperature: -40º to 80ºC (+-0.5ºC)
Created with Mobirise